The 8 Model Geometries (Pure Mathematical Framework)
8 Model Geometries
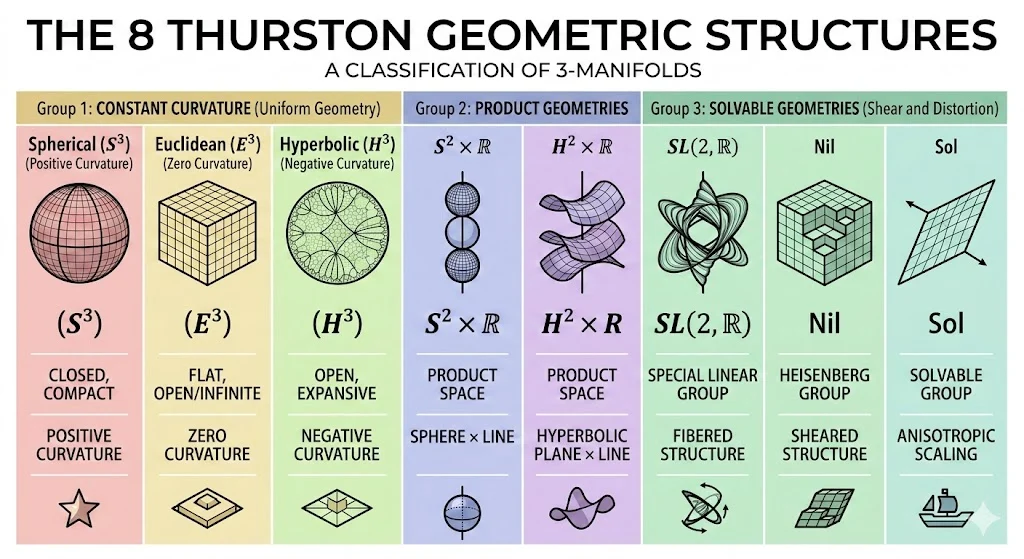
Thurston’s Geometrization Conjecture as a Business Spacetime Framework
S³
Definition: A space with constant positive curvature.
Condition: Finite in volume, compact, and simply connected. All geodesics (straight lines) are closed loops. Values cycle within a boundary-less finite system.
E³
Definition: A space with zero curvature (flat space).
Condition: Infinite and uniform. It follows standard XYZ coordinates where parallel lines never meet. Ideal for predictable, linear journey mapping.
H³
Definition: A space with constant negative curvature.
Condition: Exponential divergence of parallel lines. Volume increases exponentially with distance, allowing for infinite expansion and rapid exploration paths.
S² × ℝ
Definition: Cartesian product of a 2-sphere and a real line.
Condition: Cylindrical topology. Combines a repeating circular cross-section with an infinite linear progression along a time-axis.
H² × ℝ
Definition: Cartesian product of a hyperbolic plane and a real line.
Condition: Combines exponential expansion in the base plane with linear vertical stacking. Ideal for growing platform architectures.
Nil
Definition: Geometry of the Heisenberg group.
Condition: Twisted manifold where horizontal movement causes vertical displacement. Non-linear, algorithmic linkage between different dimensions of the system.
SL̃(2, ℝ)
Definition: Universal cover of the special linear group SL(2, ℝ).
Condition: Spiraling structure over a hyperbolic base. Represents multi-layered trust or credit cycles that return to similar points at higher energy levels.
Sol
Definition: A solvable Lie group geometry.
Condition: Highly anisotropic. Simultanously stretches along one axis and shrinks along another. Used for global arbitrage and dynamic equilibrium between opposing forces.